SCIoI @ECCV 2024 – Advancing robotic vision with event cameras and intelligent motion tracking
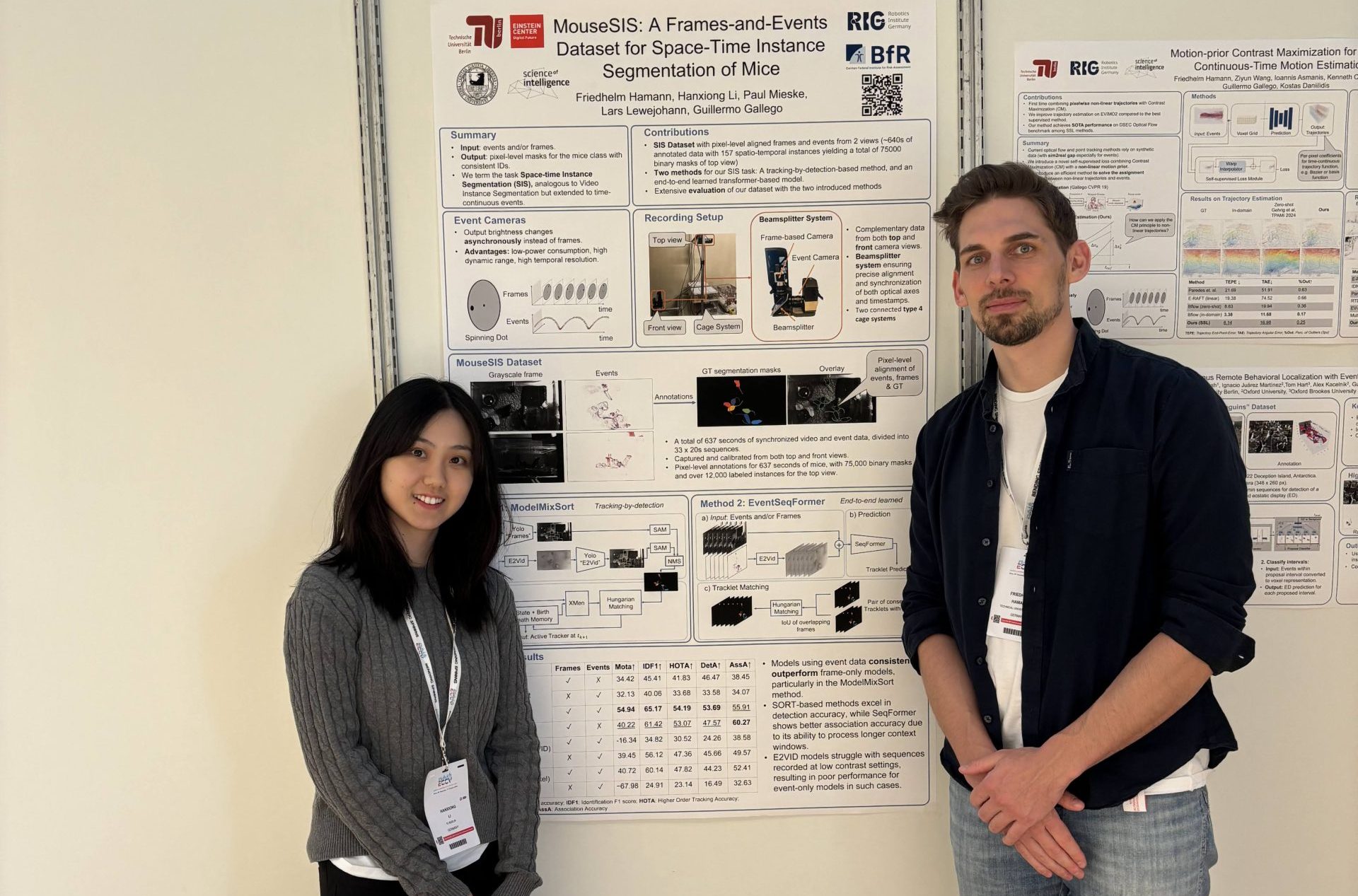
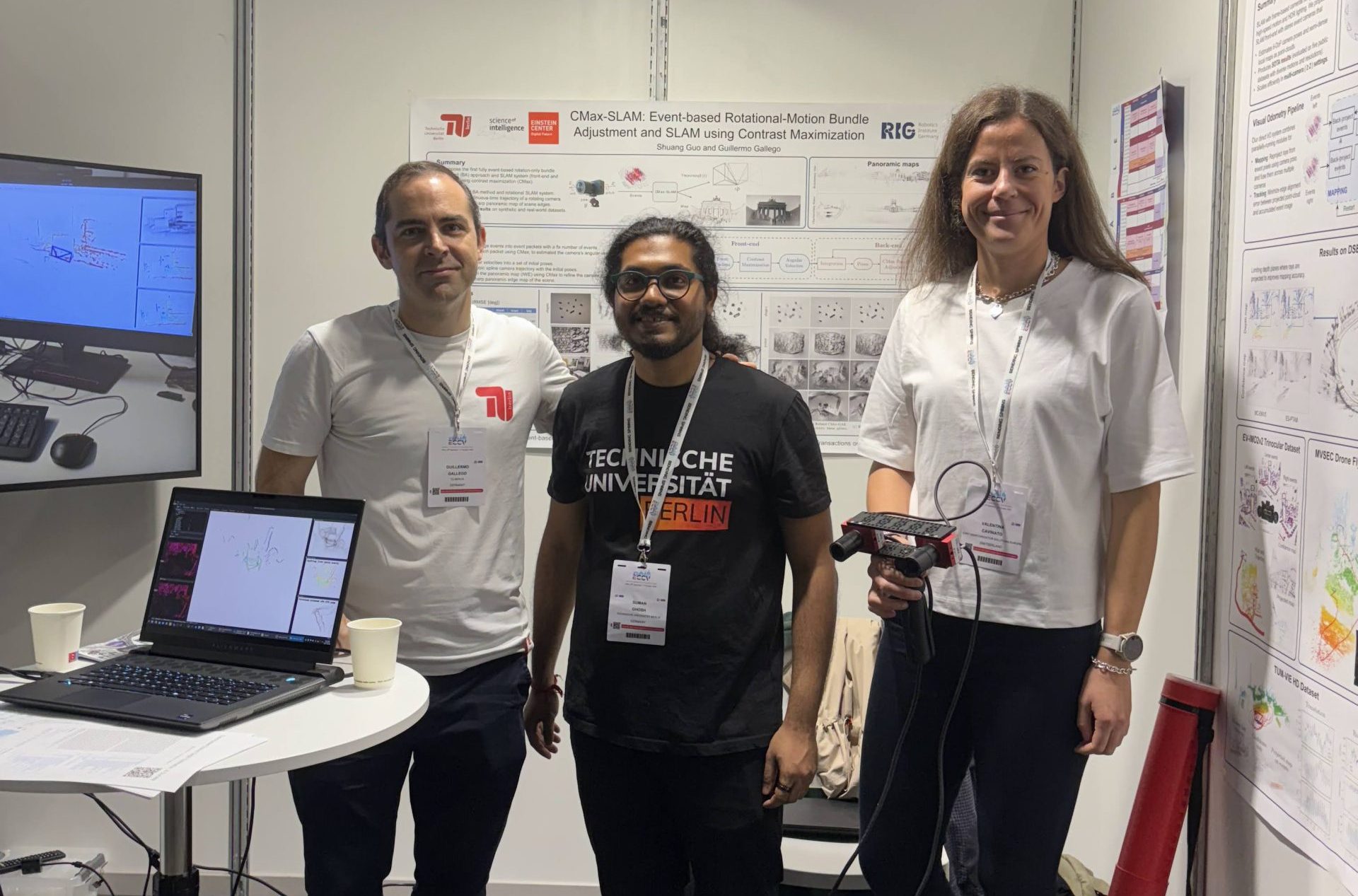
At the European Conference on Computer Vision (ECCV) 2024, held this year in Milan from 29 September to 4 October, thousands of scientists, engineers, and industry leaders came together to explore cutting-edge developments that are potentially shaping the future of artificial intelligence. Recognized as one of the top global conferences in computer vision, ECCV serves as a major platform for presenting advancements in image recognition, autonomous driving, and human-computer interaction, with workshops and presentations diving deep into machine learning techniques and real-world applications. For the SCIoI researchers Guillermo Gallego, Friedhelm Hamann with their team members Suman Ghosh, Shuang Guo and Hanxiong Li, the conference offered a stage to present their latest research through a variety of papers and workshops, fostering dialogues that may well influence the direction of computer vision for years to come.
At the main conference, the SCIoI members presented three papers and a live demo addressing different topics of their research with event cameras. With a time resolution of microseconds, six thousand times the contrast of conventional cameras, and potentially much smaller file sizes for the recorded data, event cameras promise a revolution in photography. Unlike conventional cameras, they do not record entire images at once, but instead register only the changes in brightness (the “events”) for each light-sensitive pixel separately. Because these devices mimic the visual systems of animals, they are often called “silicon retinas” and find application in the field of robotics. At SCIoI, the researchers use these cameras to evaluate images and possibly create new eyes for robots, allowing them to navigate their environment with accuracy.
ECCV focuses on fundamental research areas like image and video analysis, 3D reconstruction, object detection, and recognition, as well as deep learning, neural network architectures, and AI applications in vision technology. With their presentations at the conference, Guillermo, Friedhelm and the team contributed significantly to setting a future direction for computer vision advancements.