Science of Intelligence Fair 2023
The very first conference and exhibition of the Cluster of Excellence Science of Intelligence (SCIoI) in Berlin.

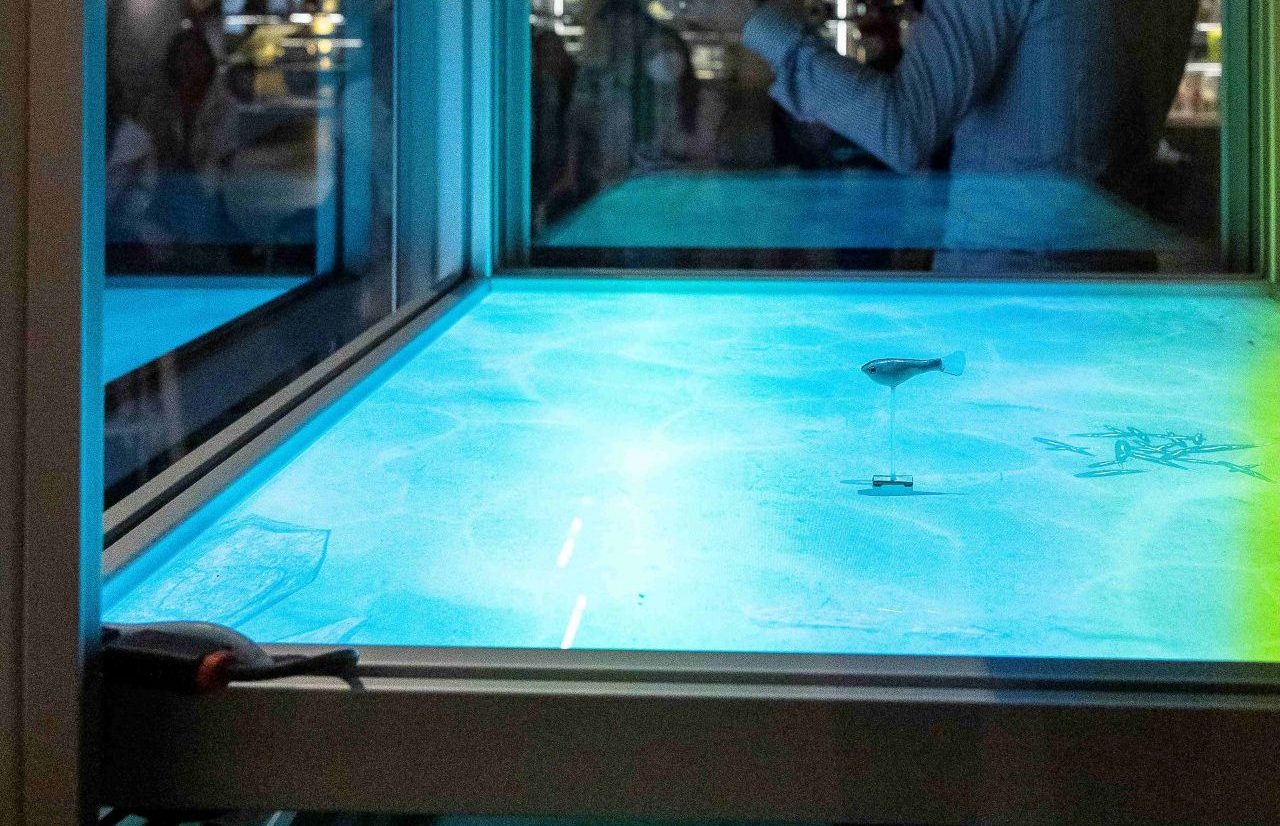
This conference is a unique opportunity for attendees to learn from leading experts, exchange ideas, and engage in live demonstrations through several exhibits straight from the labs! With its varied program, the conference reflects the interdisciplinary orientation of the work in the Cluster and covers a broad spectrum of contributions from different disciplines.
The event is aimed at people from the fields of science and politics who are interested in understanding the challenges of developing intelligent technologies.
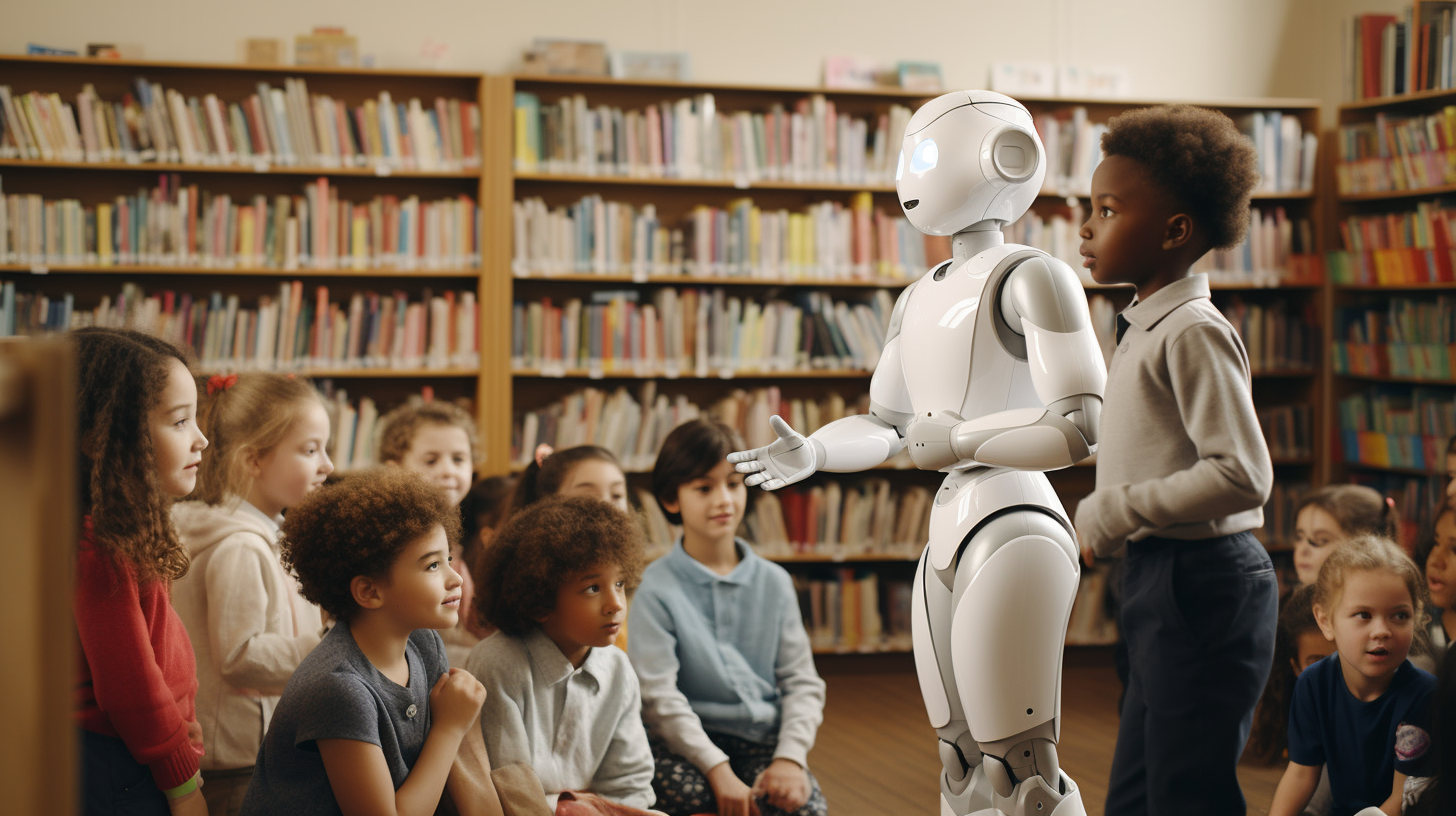
Discover the underlying principles of intelligence, whether artificial or biological, and their application in creating intelligent technology in engaging keynotes and a panel discussion with renowned speakers, as well as in our exhibition.