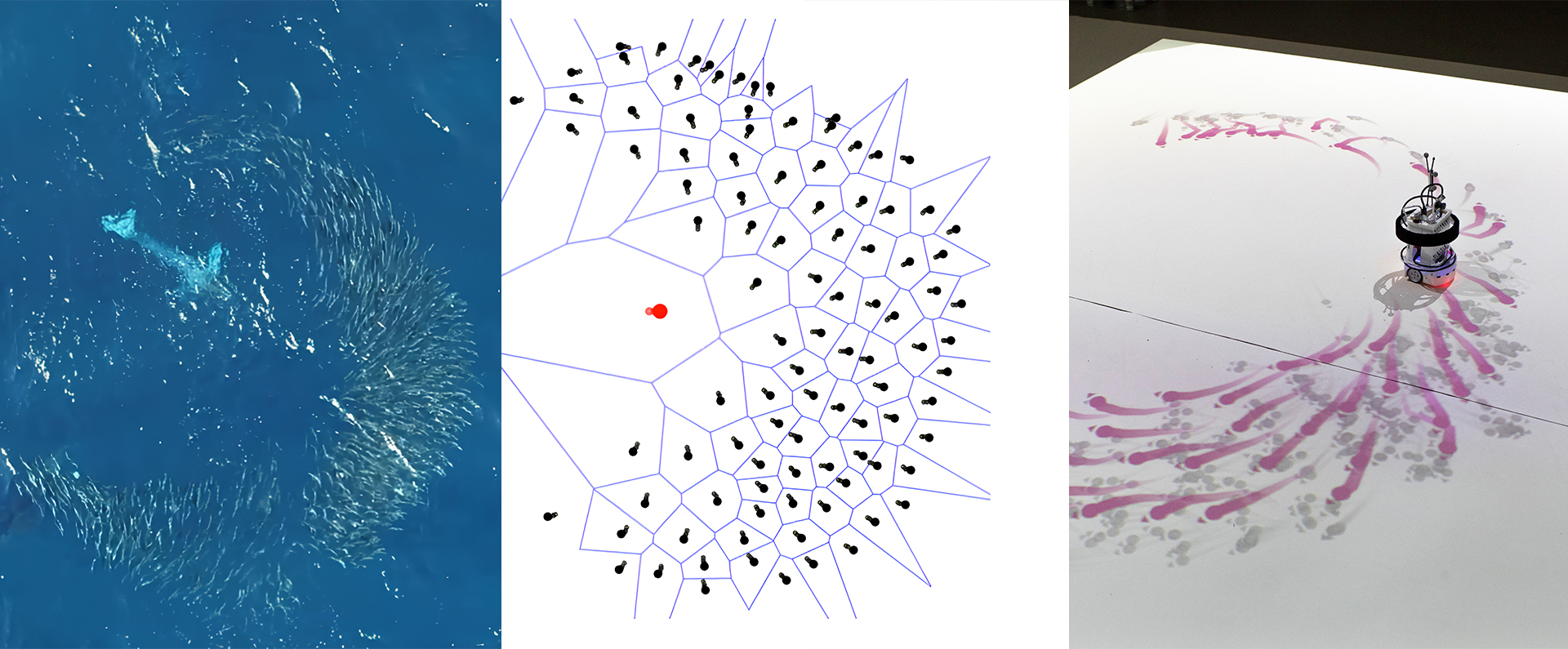
CoBe – Collective Behavior (augmented reality interactive projection for research and science transfer) ©SCIoI; David Mezey ©BUA
David: A crucial factor in testing and finding new phenomena from biological data is to also bring it to the real world and into physical systems with their own limitations similar to animals. Fish, for instance, can only move or turn as fast as the water and their bodies allow them in contrast to simulated fish. Validating findings not only in simulations but also in real-world scenarios using robots gives us a better understanding about the observed behavior. It allows us to introduce the complexities and unpredictabilities of the real world that simulations cannot fully capture. These include variations in lighting, surface textures and friction, obstacles or a limited perception and it is also commonly known as the simulation-to-reality gap. As a result, real-world applications, in contrast to simulations, can uncover unforeseen challenges that an embodied system must always face, be it animals or robots. This way, studying behavior on robots might also facilitate understanding behavior in animals.
Palina: To bring into reality two robot swarms interacting with each other is a real engineering challenge. One has to get right not only the interactions inside each collective but also between the collectives. Here, the simulation-to-reality gap can become a bottleneck or rather an inspiration, as it was in our case.
David: To tackle this challenge, we came up with an exciting system using augmented reality. We built a big arena where the simulated fish are projected on the ground, and based on Palina’s algorithms they react similarly to what is observed in nature. This is the “augmented” part. The “reality” part is where physical agents, for example, humans or robots can interact with the projected fish swarm as predators and try to catch the fish, which reacts to them in real time and in some cases results in the fountain effect. Successful patterns that are shared across these systems might uncover general principles of collective intelligence.
Palina: Also, it is a fantastic ground for proof-testing the models. It was hard to replicate a predator’s behavior separating a single fish from the group in the simulation until the robot successfully did it while using the same strategy!
What have you already learnt?
David: For example, how much easier it is to catch the projected fish, if you’re hunting them in a group of two. No wonder marlin hunt in groups! I will soon be supervising a course at the Technical University of Berlin that allows students to learn the basics of modeling collective behavior and they can also implement their models in our interactive arena, among other things. In the meantime, our system serves not only our experiments, but also as an important science communication tool. Our interactive arena allows our visitors to interact closely with our simulations and dive deep into our research. Quite literally!
Alicia: And that can be very instructive! I thought that my knowledge of how marlins hunt would make me an excellent sardine hunter. But quite the opposite is true: I was worse than many people who were dealing with the topic for the first time (laughs).