Consistent guidance, happier learners: A new SCIoI study on robotic tutors
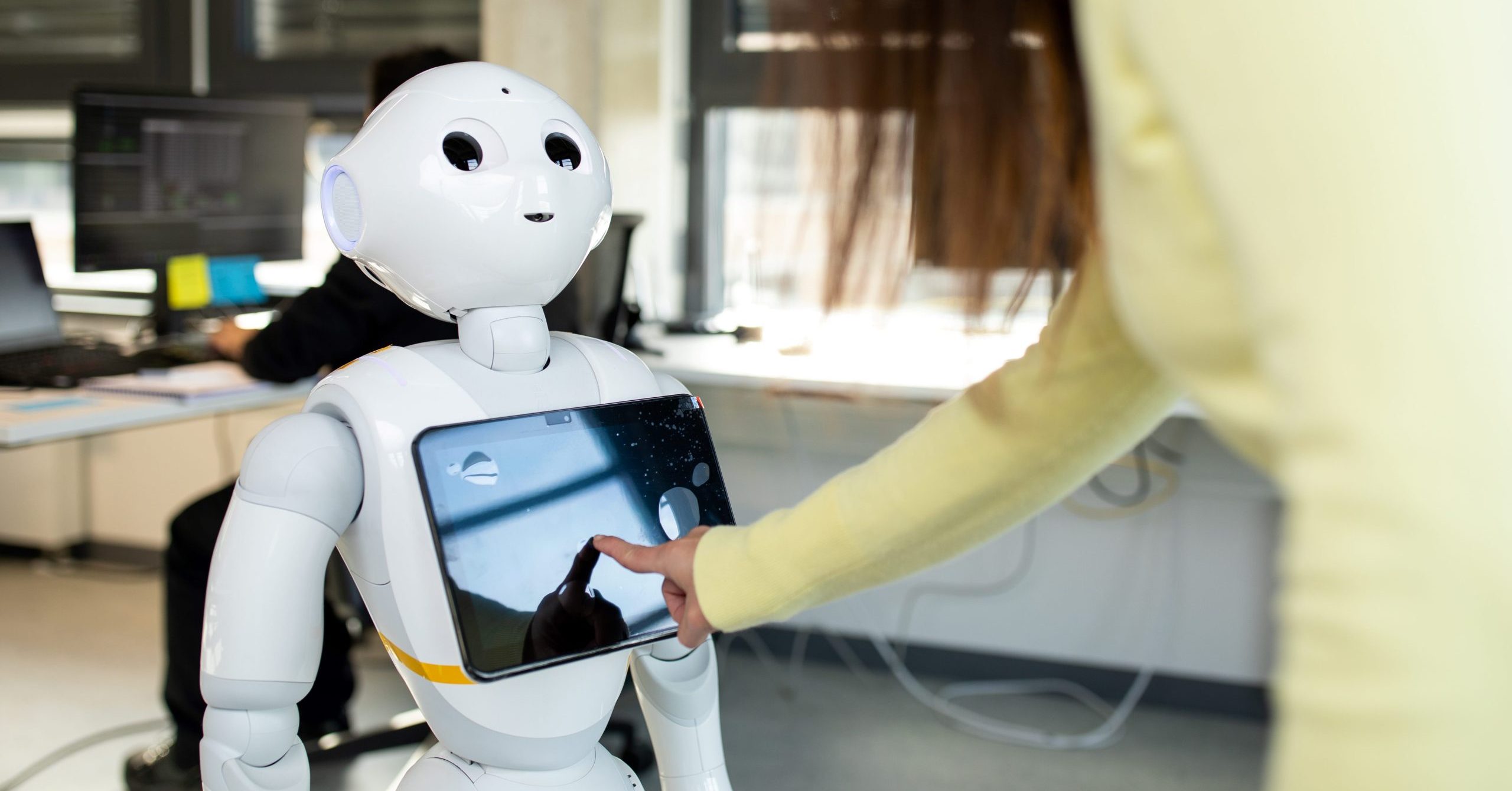
The first encounter with Pepper, the robot designed to teach among other tasks, brought with it the promise of reshaping education. Rather than being seen as just another machine, Pepper was crafted to be an engaging, interactive educator, supporting teachers in the classroom by personalizing interaction and adapting to the learner’s pace. It promised to possess the ability to bridge technology and human interaction, leading to a more dynamic, inclusive, and responsive learning environment. Yet, a new study titled “How adaptive social robots influence cognitive, emotional, and self-regulated learning”, published in scientific reports, and led by Helene Ackermann, Anna L. Lange, Verena V. Hafner, and Rebecca Lazarides from Science of Intelligence, reveals that when it comes to learning with and from an artificial agent or robot, predictability may matter more than personal adaptation. In this experiment, 120 participants tackled a vocabulary learning task with Pepper as their tutor, and the findings were both surprising and intriguing.
The study compared several teaching approaches to investigate how adaptive teaching impacts learning. In the non-adaptive conditions, Pepper either provided basic correctness feedback — simply indicating whether an answer was right or wrong — or consistently delivered hints every time a mistake was made. In contrast, in the adaptive conditions Pepper individually adjusted the number of hints based on the learner’s performance and self-reported enjoyment. In the more advanced personalized adaptive condition, the robot not only adjusted the frequency of hints, but also tailored the feedback to address the learner’s specific errors.